

千巡翼X1間讓航測(cè)效率加倍提升
千巡翼X1間讓航測(cè)效率加倍提升

隨著“實(shí)景三維中國建設(shè)”的不斷深化以及數(shù)字化生產(chǎn)管理的應(yīng)用發(fā)展,現(xiàn)階段園區(qū)、學(xué)校、住宅小區(qū)、工廠等進(jìn)行數(shù)字化三維重建的需求日益增長。這類需求往往面積不大,意味著項(xiàng)目的成本控制較為嚴(yán)格,但是同時(shí)作業(yè)環(huán)境復(fù)雜,而且對(duì)數(shù)據(jù)質(zhì)量要求高,因此,非常適合利用小型多旋翼無人機(jī)進(jìn)行數(shù)據(jù)采集作業(yè)。
千巡翼X1,軸距不到38厘米,免基站、免像控,是非常適合于這類小型項(xiàng)目的航測(cè)平臺(tái)。
以某園區(qū)傾斜攝影測(cè)量建模項(xiàng)目為例,千巡翼X1從飛行時(shí)間、起降點(diǎn)選擇、現(xiàn)場(chǎng)部署、數(shù)據(jù)傳輸、數(shù)據(jù)處理這5個(gè)環(huán)節(jié)全鏈路提升作業(yè)效率,作業(yè)時(shí)間減少40%,它是如何做到的?

1.作業(yè)現(xiàn)場(chǎng):無縫銜接

千巡翼X1的最長續(xù)航能力可達(dá)36分鐘,作業(yè)過程中,技術(shù)人員設(shè)計(jì)了15%返航電量作為安全冗余,總計(jì)有效航飛時(shí)間在25-30分鐘左右,183分鐘航線任務(wù)總計(jì)需要7-8架次的飛行。
因此項(xiàng)目選用千巡翼X1無人機(jī)和電池管家與4塊智能鋰電池,配合戶外移動(dòng)電源,即可實(shí)現(xiàn)電池?zé)o縫銜接續(xù)航能力。
2.起降點(diǎn)選擇:易如反掌

在選擇起降點(diǎn)階段,憑借千巡翼X1卓越的全向避障能力和長達(dá)9公里的控制半徑,可極大降低選點(diǎn)時(shí)間,在路邊、房頂、車頂,甚至在手中,都可以實(shí)現(xiàn)X1的安全起降,同時(shí)9公里的控制半徑,無需更換起降位置,一個(gè)地點(diǎn)完成全部測(cè)區(qū)覆蓋。
3.作業(yè)能力:免基站 免像控
在測(cè)區(qū)踏勘階段,無需布設(shè)GNSS基站,利用千巡翼X1內(nèi)置的SDK級(jí)千尋知寸網(wǎng)絡(luò)RTK和千尋云跡網(wǎng)絡(luò)PPK解算,既保障了免像控的高精度,又節(jié)省GNSS基站成本,同時(shí)只需要布設(shè)3-4個(gè)像控檢查點(diǎn)即可保障數(shù)據(jù)成果的精度萬無一失。
4.數(shù)據(jù)處理模式:內(nèi)外業(yè)同步

在外業(yè)完成航飛后,直接將外業(yè)數(shù)據(jù)上傳至FindPixel進(jìn)行數(shù)據(jù)處理即可,千巡翼X1的單張影像在8MB左右,0.3平方公里總計(jì)產(chǎn)生2000張?jiān)加跋瘢傆?jì)16GB,如果利用5G熱點(diǎn),不到15分鐘即可完成數(shù)據(jù)上傳,即便是使用4G網(wǎng)絡(luò),總計(jì)50分鐘內(nèi)也可完成數(shù)據(jù)上傳。通常,在從外業(yè)現(xiàn)場(chǎng)返回到辦公室的路上,即可完成全部數(shù)據(jù)的上傳。內(nèi)業(yè)處理過程中,利用FindPixel的集群算力,2000張影像僅需2-3小時(shí)即可完成實(shí)景三維的成果生成。
5.整體效率:提升40%以上
在本項(xiàng)目中,千巡翼X1僅用6個(gè)小時(shí)即完成從外業(yè)到內(nèi)業(yè)的全部處理,而傳統(tǒng)的方法則至少需要10個(gè)小時(shí)以上,5個(gè)環(huán)節(jié)全鏈路控制作業(yè)效率。
飛行時(shí)間
千巡翼X1利用自身更長的續(xù)航能力,同樣的180分鐘航線任務(wù),7-8架次即可完成飛行,普通的多旋翼則需要10個(gè)架次,雖然飛行時(shí)間都是180分鐘,但是額外的2個(gè)架次會(huì)將時(shí)間浪費(fèi)在返航、出航、更換電池等操作上,因此,隨著任務(wù)體量增大,這項(xiàng)差距會(huì)越來越明顯。
起降點(diǎn)選擇
千巡翼X1幾乎不需要刻意選擇起降位置,只要在測(cè)區(qū)附近,人流量較少即可,而普通的多旋翼無人機(jī),要考慮遮擋、控制半徑等條件,需要更長的時(shí)間來選擇作業(yè)位置。
現(xiàn)場(chǎng)部署
千巡翼X1無需GNSS基站來保障PPK解算,僅需要展開無人機(jī),利用KML規(guī)劃航線即可,直接免除了現(xiàn)場(chǎng)部署的一個(gè)環(huán)節(jié)。
數(shù)據(jù)傳輸
千巡翼X1只需要向FindPixel上傳原始數(shù)據(jù)即可,無需內(nèi)業(yè)人員下載,整理的環(huán)節(jié),不僅無需各類網(wǎng)盤的會(huì)員,而且大幅度節(jié)省了數(shù)據(jù)傳輸?shù)暮臅r(shí)。
數(shù)據(jù)處理
千巡翼X1無需高性能的工作站或集群,而普通的作業(yè)模式不僅數(shù)據(jù)處理速度上難以與FindPixel比擬,額外的計(jì)算機(jī)和軟件采購成本也非常巨大。

通過這個(gè)小型項(xiàng)目實(shí)踐,證明千巡翼X1不僅在效率上遠(yuǎn)超傳統(tǒng)的作業(yè)模式,而且綜合的使用成本更實(shí)現(xiàn)了全鏈路的壓縮節(jié)約,非常適合各類中小型項(xiàng)目的實(shí)施應(yīng)用。
聲明:以上內(nèi)容來源于網(wǎng)絡(luò)文章轉(zhuǎn)載,轉(zhuǎn)自千尋位置行業(yè)應(yīng)用,出于傳遞信息及學(xué)習(xí)之目的,不代表本網(wǎng)站的觀點(diǎn)、立場(chǎng),本網(wǎng)站不對(duì)其真實(shí)性負(fù)責(zé)。
更多相關(guān)
激光掃描三維建模和傾斜攝影實(shí)景建模的區(qū)別
激光掃描三維建模和傾斜攝影實(shí)景建模的區(qū)別目前最為普遍且受歡迎的實(shí)景建模方式是激光掃描三維建模和傾斜攝影建模。接下來,我們一起來了解下這兩種方式有什么區(qū)別和優(yōu)勢(shì),適用于哪些地方。 一、數(shù)據(jù)獲取...

大型堆體測(cè)量,這款輕量化三維激光十幾分鐘搞定!
堆體測(cè)量,尤其是大型堆體體積測(cè)量如何提高準(zhǔn)確性,是困擾行業(yè)多年的難題。正常的大型堆體一般有萬噸以上,如測(cè)量誤差超過1%,價(jià)值損失就在千萬元以上。因此,提高大型堆體體積測(cè)量的...

CORS賬號(hào):什么是千尋知寸CORS賬號(hào)?有什么用途?
一、什么是千尋知寸CORS賬號(hào)?千尋知寸CORS賬號(hào),簡(jiǎn)單來說,是用戶接入“千尋位置”所提供的國家級(jí)高精度定位服務(wù)的數(shù)字身份憑證和訪問許可。要理解這個(gè)賬號(hào),我們需要先拆解兩個(gè)核心概念:“千尋位置”和...

測(cè)繪技術(shù)服務(wù)在地理國情監(jiān)測(cè)中的成果應(yīng)用
2018年初夏時(shí)節(jié),赤水河畔,四川測(cè)繪地理信息局測(cè)繪技術(shù)服務(wù)中心的一架白色DB-2測(cè)繪無人機(jī)劃破長空。數(shù)小時(shí)后,一張赤水河畔某林場(chǎng)松樹松材線蟲疫情專題圖就放在了四川、貴州兩省森林病蟲防治檢疫總...

徠卡BLK2GO手持三維實(shí)景掃描儀防爆版發(fā)布
徠卡BLK2GO防爆版是一款專門為危險(xiǎn)環(huán)境設(shè)計(jì),具有防爆特性的三維實(shí)景掃描儀,其不僅集成了激光雷達(dá)、SLAM、全景相機(jī)、IMU等多項(xiàng)先進(jìn)技術(shù),還采用創(chuàng)新的一體化設(shè)計(jì),能夠在易燃易爆環(huán)境下安全使用,保障...
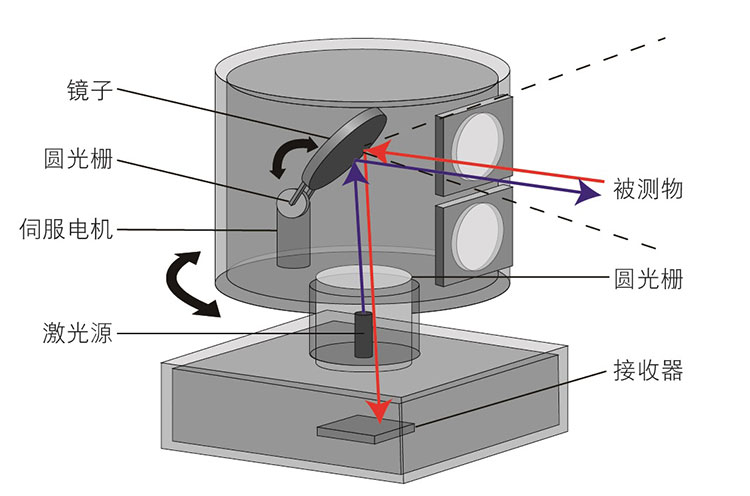
三維激光掃描儀的工作原理
三維激光掃描儀的工作原理三維激光掃描儀是一種通過激光技術(shù)快速獲取物體表面三維空間信息的設(shè)備,廣泛應(yīng)用于測(cè)繪、建筑、工業(yè)檢測(cè)、文化遺產(chǎn)保護(hù)等領(lǐng)域。其核心原理是通過發(fā)射激光束并接收反射信號(hào),結(jié)合精密的時(shí)間...

所見即所測(cè), U3 AR視覺RTK“速”不可擋!
所見即所測(cè),U3AR視覺RTK“速”不可擋!...
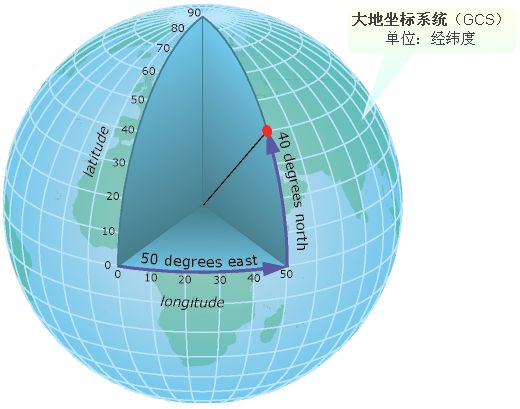
關(guān)于大地坐標(biāo)系四參數(shù)和七參數(shù)的幾點(diǎn)認(rèn)識(shí)
我們?cè)谌粘5臏y(cè)繪當(dāng)中經(jīng)常要用到相關(guān)的參數(shù),四參數(shù)和七參數(shù)更是經(jīng)常提到。以下僅提供本人對(duì)大地坐標(biāo)系四參數(shù)和七參數(shù)的幾點(diǎn)認(rèn)識(shí): 參數(shù)的概念 1、兩個(gè)不同的二維平面直角坐標(biāo)系之間轉(zhuǎn)換時(shí),通常使用四參...
 環(huán)球測(cè)繪微信
環(huán)球測(cè)繪微信